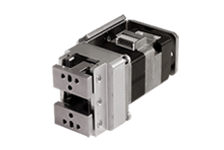
・High-precision grip force control, speed control and position control are feasible.
・Work sizes and work falls are also detectable.
・Reduced in size and weight by adopting the cam mechanism, and multidimensional mounting made feasible with robot arms or the like.
-
-
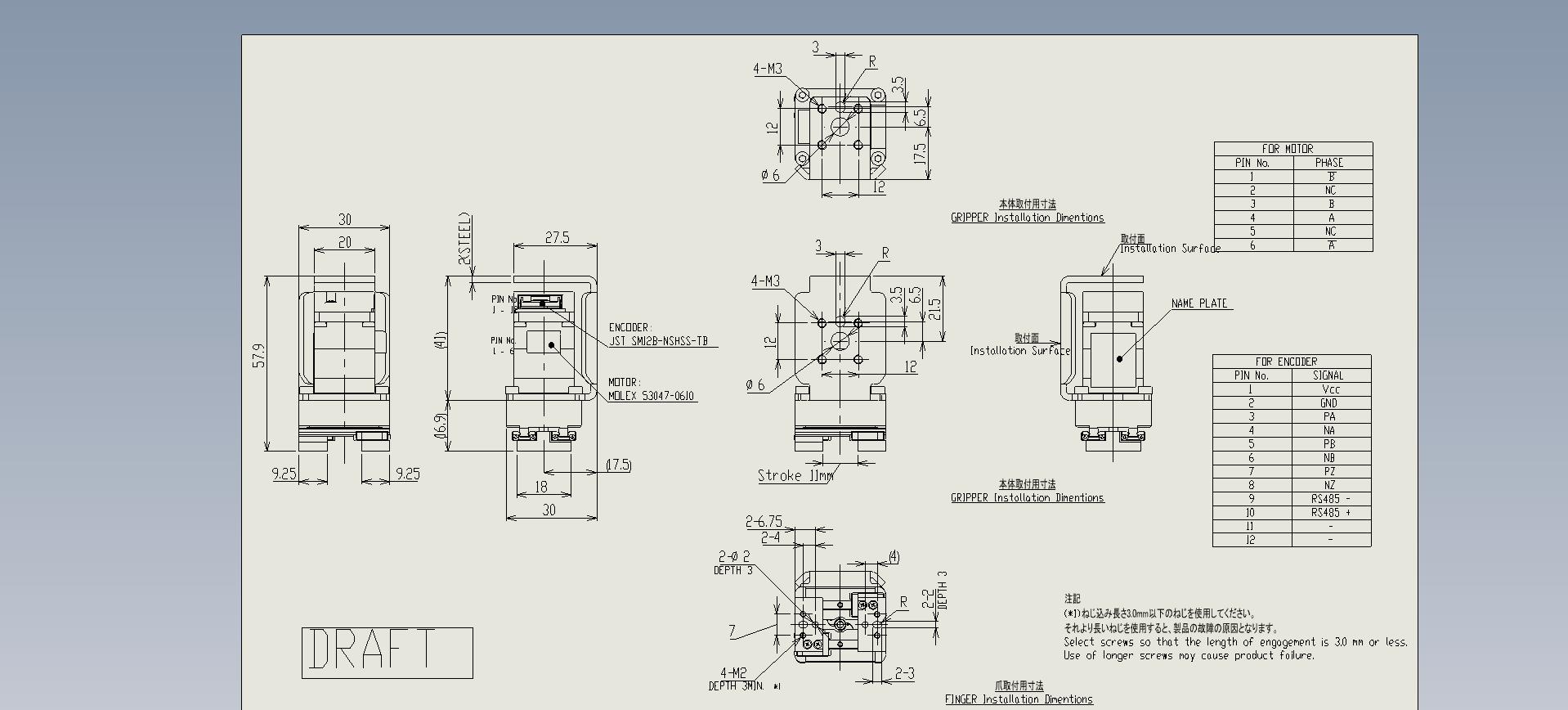
Stroke
[mm]11 Grip force
lower limit
[N]0.7 Grip force
upper limit
[N]2.4 Repetitive positioning accuracy
[mm]±0.02 Weight
[g]100 Specifications are subject to change without notice.
-
Featured Products

Case Studies

Product Topics

Industry





Contact Us
Please click the inquiry type below according to your question. Each product / sales representative will respond to you.