ヒューマノイドロボットの進化を支える精密技術
ヒューマノイドロボットの進化を支えるミネベアミツミ製品
ヒューマノイドロボットの仕組みや構成も解説
ヒューマノイドロボットとは、人間の外観や動作を模した自律型ロボットのこと。労働力不足の解消や複雑な環境下での作業などヒューマノイドロボットの社会実装に期待が高まっている中、その実現には精密な技術が求められます。ミネベアミツミは、ベアリング、モーター、センサーなどの精密技術を通じて、ヒューマノイドロボットの進化を支えます。
ヒューマノイドロボットとは、人間の外観や動作を模した自律型ロボットのこと。労働力不足の解消や複雑な環境下での作業などヒューマノイドロボットの社会実装に期待が高まっている中、その実現には精密な技術が求められます。ミネベアミツミは、ベアリング、モーター、センサーなどの精密技術を通じて、ヒューマノイドロボットの進化を支えます。
ヒューマノイドロボットの仕組み
ヒューマノイドロボットの仕組みは、「脳(AI)・五感(センサー)・身体(関節や筋肉)」の3つの要素が高度に連動することで成り立っています。
近年、マルチモーダルAI※1の進化により、周囲を認知・判断する「脳」が劇的に進化しました。それに伴い、脳の命令を正確に物理動作へ変換する「身体」と、現実世界の情報を脳へフィードバックする「五感」の精密さが、ロボットの仕組み全体のパフォーマンスを左右する鍵となっています。
ミネベアミツミは、この物理領域を支える超精密部品の「相合(SOGO)※2」により、ヒューマノイドの進化を支えています。
「ひずみゲージ式力覚センサー」などのセンシング技術がロボットの五感を担い、関節の回転を支える「超精密ボールベアリング」、高出力な「モーター」、力を伝える「ボールねじ」、これらを制御する「モーター駆動IC(半導体)」が高度に一体化した「アクチュエーター」が、仮想空間と現実の誤差を極限まで縮めるブレのない身体動作(Sim-to-Realの実現)を可能にします。 研究開発から量産、高信頼性の担保まで、当社の精密技術が知的変革(IX : Intelligent Transformation)の仕組みを足元から支えています。
※1 マルチモーダルAI:画像、音声、テキスト、センサーデータなど、複数の異なる情報を統合して高度に処理・判断するAI技術。
※2 相合(SOGO):総合ではなく、相い合わせることを意味する造語。当社グループのあらゆるリソースを掛け合わせ、相乗効果により新たな価値を創造すること。
ヒューマノイドロボットの用途
ヒューマノイドロボットは、人間と同じ空間で、既存の道具や環境をそのまま活用できるため、多様な分野での導入が進んでいます。
主な用途の一つが「製造・物流現場」です。深刻化する労働力不足や「物流の2030年問題」といった社会課題に対し、これまで自動化が困難だった複雑なピッキングや組み立て作業を担います。また、災害現場や高所、高温環境などの「危険作業・極限環境」におけるインフラ点検や保守作業の代替手段としても期待されています。
さらに、生活に身近な「サービス・医療・介護分野」への展開も見込まれています。これら人と共生する環境では、ロボットに不快感を与えない「静音性」や、接触時の安全を担保する「対人制御」が不可欠です。
ミネベアミツミは、超精密ベアリングによる「極限の静音・低振動」や、高応答性モーターと力覚センサーの相合(SOGO)による「安全なトルク制御」でこれらの要求に応えます。多様な用途を支える高耐久・高品質なアクチュエーターコンポーネントの提供を通じて、知的変革(IX)の社会実装に貢献します。
ヒューマノイドロボットに求められる性能
定型作業を行う産業用ロボットとは異なり、ヒューマノイドロボットには変化する状況に対応する高度な身体制御が求められます。

耐久性・信頼性
人間と同等、あるいはそれ以上の過酷な動作に耐え得る、高度な耐久性と信頼性が不可欠です。
低消費電力
バッテリー駆動を前提とするため、稼働時間を最大化する各デバイスの省電力設計が求められます。

静音性
生活空間や対人環境で稼働するため、不快感を与えない静かな動作環境への配慮(静音化)が重要です。
高感度・多軸センシング・高速通信
人間の「感覚」を精緻に再現し、リアルタイムな動作を実現するために欠かせない要素です。
高可搬荷重(把持力)
人間以上の作業を遂行するため、重量物を確実につかみ、持ち上げる能力が求められます。
高次元の性能を実現するミネベアミツミの製品
静音性、耐荷重性能の高いベアリングや高出力密度かつ軽量・コンパクトな設計のモーター、高速伝送規格に対応したコネクタなどの製品群でヒューマノイドロボットを支えます。

①カメラ・ビジョンセンサー
-

高速伝送規格に対応し、大容量データを確実・高速に届ける高い信頼性を有します。
-
光学アクチュエーター
ミネベアミツミの精密組み立て技術によって、高精度・高信頼性を実現しています。
③リニアアクチュエーター
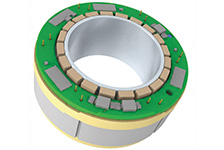
②回転アクチュエーター
-

力覚センサー
豊富な量産実績・技術ノウハウ・専用解析ツールを駆使し用途・ご要望にあわせてカスタムで対応します。
-

独自のグリース開発と軸受鋼の開発による薄肉ベアリングや、静音性、耐荷重性能の高いベアリングを展開しています。
-
フレームレスモーター
高出力密度かつ軽量・コンパクトな設計によりロボットの可搬重量を向上します。
④バッテリー
アナログ半導体
-

高分解能ADCでセンサーの出力を高精度にデジタル出力します。
①カメラ・ビジョンセンサー
-
高速伝送規格に対応し、大容量データを確実・高速に届ける高い信頼性を有します。
-
光学アクチュエーター
ミネベアミツミの精密組み立て技術によって、高精度・高信頼性を実現しています。
②回転アクチュエーター
-
力覚センサー
豊富な量産実績・技術ノウハウ・専用解析ツールを駆使し用途・ご要望にあわせてカスタムで対応します。
-
独自のグリース開発と軸受鋼の開発による薄肉ベアリングや、静音性、耐荷重性能の高いベアリングを展開しています。
-
フレームレスモーター
高出力密度かつ軽量・コンパクトな設計によりロボットの可搬重量を向上します。
③リニアアクチュエーター
-

滑らかな動作と高精度な位置決めが可能です。
-
独自のグリース開発と軸受鋼の開発による薄肉ベアリングや、静音性、耐荷重性能の高いベアリングを展開しています。
-
フレームレスモーター
高出力密度かつ軽量・コンパクトな設計によりロボットの可搬重量を向上します。
-

1軸力覚センサー
④バッテリー
-
高い検出精度と豊富な機能を備え電池の安全な充電と保護を可能にします。
-

-

高効率・長寿命また防水性能を高めたファンモーターを展開しています。
コネクタ
-

外部接続、内部接続など安全に接続・着脱させます。
-

-

過酷な環境下での使用を想定した設計。国際規格IP67/IPX9K対応のタフネスさを有します。
アナログ半導体
-
高分解能ADCでセンサーの出力を高精度にデジタル出力します。

⑤小型ボールベアリング
-

外径35mm以下のサイズで豊富なラインアップからロボットハンドの滑らかな動きに貢献します。


⑤小型ボールベアリング
-
外径35mm以下のサイズで豊富なラインアップからロボットハンドの滑らかな動きに貢献します。
アメリカ ラスベガスで開催された世界最大級のテックイベント「CES 2026」で最新技術を披露
グループの技術を相合し、
ロボットハンドを実現。

※ロボットハンドの駆動部は、株式会社ハーモニック・ドライブ・システムズとの共同開発品です
ロボットハンド(CES展示品(開発中))の特長
-
1. 高速動作と高い把持力
フィンガーモジュール1個につき特性の異なるアクチュエータを2個搭載することで高速動作と高い把持力を実現。
*スモールタイプは1個のみ搭載 -
2.「硬いもの」と「柔らかいもの」の把持
内製ひずみゲージによる微細な力検出機能で、対象物の硬さに応じた適切な把持が可能。
-
3. 低消費電力
メカニカルロック機能を搭載し、把持状態の維持などに伴う電力消費を低減。
-
4. 内製精密部品の集積
ハンド1つあたり85個の小径ベアリングと11個のアクチュエータを使用。
※ロボットハンドの駆動部は、株式会社ハーモニック・ドライブ・システムズとの共同開発品です
FAQ
Q ヒューマノイドロボットの開発において、ミネベアミツミの製品を採用するメリットは何ですか?
A ヒューマノイドロボット向けの数多くの製品のご提案が可能です。ミネベアミツミはベアリングで培った超精密機械加工技術を核に、モーター、センサー、半導体といった、ロボットの駆動・制御に不可欠な精密部品を豊富にラインナップしており、選定や技術に関するご相談をまとめて承ることができます。
Q ヒューマノイドロボットの関節駆動に最適なモーターやベアリングのカスタマイズは可能ですか?
はい、可能です。ヒューマノイドロボットの設計に応じ、出力トルク、外径サイズ、重量の制約に合わせたモーター設計や、長寿命を実現するベアリングの選定・カスタマイズを承っております。