力覚センサー
力覚センサーとは力やトルクの大きさをリアルタイムに計測するセンサーを指し、細かなセンシングを行うことができます。なかでも小型ロボットに適した中型から小型サイズの力覚センサーは需要拡大が期待されています。また、MEMSの採用によってこれまで価格などの問題から導入が難しかった領域での採用も増えています。
ここでは力覚センサーの用途や特徴と、ミネベアミツミの小型6軸力覚センサーについて説明します。
力覚センサーとは
力覚センサーとは、作用する力やトルクの大きさ・方向を測定する装置のことで、人間の五感に例えると触覚にあたり、ロボットなどの機械に繊細な感覚を与えてくれます。
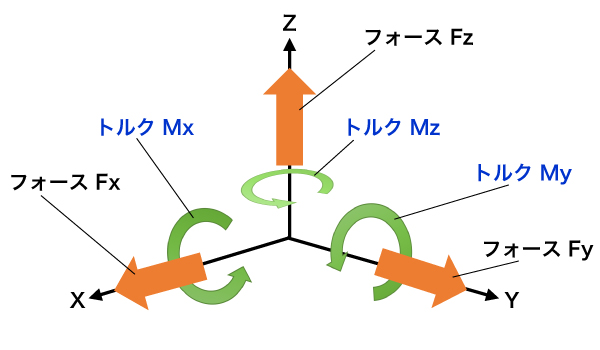
6軸力覚センサーはX・Y・Zのそれぞれの軸に掛かる力(フォース)、X・Y・Z軸の回転方向に掛かる力(モーメント/トルク)を測定できる力覚センサーのことをいいます。
力覚センサーには6軸力覚センサー以外に、1軸のフォースやトルクを計測するもの、3軸のフォースや、X・Yの2軸のフォースとZの1軸のトルクを検出する3軸力覚センサーなどがあり、用途に応じてさまざまな種類のものが使い分けられています。
MEMSを使った力覚センサー
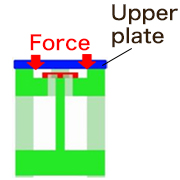
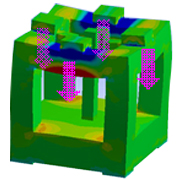
MEMSによる力覚センサーは力やモーメントの計測ができ、把持した時のバランスを回転方向の力としても計測できます。力覚センサーをロボットに搭載することで、人間の持つ感覚に近い作業を実現することができます。
力覚センサーの検出方式には、ひずみゲージ式・圧電式・光学式・静電容量式などがあり、主にロボットの手首部分に使用されています。また小型の力覚センサーはMEMSプロセスで製造したものをはじめ、磁気や圧力、ピエゾ素子などを使用したものがあり、ロボットハンドの指に掛かる力の検知などに用いられています。
力覚センサーの活用事例
力覚センサーの活用事例の中でも6軸力覚センサーについて紹介します。
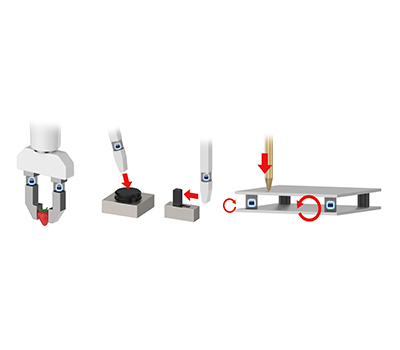
6軸力覚センサーはロボットアームの手首部分に取り付けることが主流になっており、主な用途としてはバリ取りや研磨などが挙げられます。従来のロボットアームでは決められた動きしかできませんでしたが、6軸力覚センサーを搭載したロボットアームなら作業の動きを自由かつ簡単に決められるため、従来よりもきめ細かな動きができます。
また、ロボット以外の用途では風洞実験での羽根の揚力計測をはじめ、センサーとしてのデータを収集する目的でも使用されています。
ミネベアミツミの力覚センサー
多関節の産業ロボットは、これまで自動車の製造工程で最も使われてきました。そのためロボットも大型になっており、使用されている6軸力覚センサーの計測範囲も100kgs前後と比較的大型のものが一般的でした。
しかし、電子機器やサービス分野で活躍するロボットが増加し、定格範囲が20kgs未満のロボットの普及が進むにつれて、力覚センサーの使用用途も拡大しつつあります。MEMSを使用したミネベアミツミの小型6軸力覚センサーはMEMS+起歪体という独自の構成により、小型化と高い定格を達成し、幅広い業界や分野で活用されています。

特徴
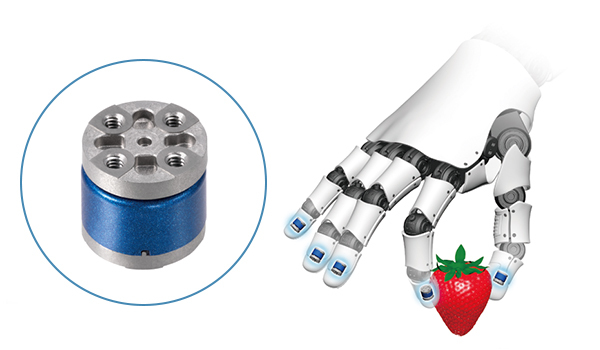
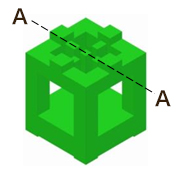
ミネベアミツミの小型6軸力覚センサーはMEMS技術によって世界最小・最軽量クラス*のΦ9.6x9mmを実現し、これまで使用できなかった狭小な箇所でも使うことができます。
また、デジタル(SPI)6軸力覚センサーのため、アナログセンサーと比べてノイズに強く、正確なデータの取得が可能です。半導体プロセスで製造されているため、量産性に優れており、独自技術で製造したMEMS+起歪体の複合センサーは、小型化と高い定格を両立しました。
当社調べ

製品紹介
| 項目 | 仕様 |
|---|---|
| サイズ(外径×高さ) | Φ9.6mm × 9.0mm |
| 重量 | 3.0g |
| 定格荷重 (フォース, モーメント) | 40N, 0.4N·m |
| 耐荷重 (フォース, モーメント) | 200N, 1.8N·m |
| 理論分解能 (フォース, モーメント) | 0.001N, 0.00001N·m |
| 実効分解能 (RMSノイズ) Fx,Fy / Fz | 0.04N / 0.06N |
| 実効分解能 (RMSノイズ) Mx,My / Mz | 0.0004N・m / 0.0008N・m |
| 直線性 | ±1.0%FS |
| ヒステリシス | ±1.0%FS |
| 精度 | ±5.0%FS |
| インターフェース | SPI |
| 変換時間 | 0.78msec |
| 電源電圧 | VDD 3.8~14V VDDIO 1.14~3.6V |
採用事例
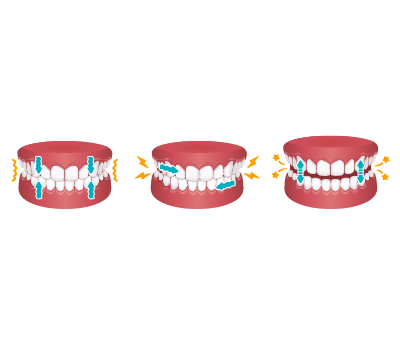
採用事例にはロボットハンドや歯科・医療分野、ドローンなどがあります。
そのほか、国内を代表する製造メーカーにおいて自律制御のロボットのハンドとして採用されています。また押し感や振動の検知に加え小型・軽量という特長により、幅広い分野で活用されています。